We first show that the loops with some fixed basepoint form a group under certain defined multiplication.
Let X be a topological space and I=[0,1], a continuous map α:I→X is called a path with initial point x0, endpoint x1 if α(0)=x0,α(1)=x1. We call the path a loop if x0=x1 with base point x0.
Let α,β:I→X be paths such that α(1)=β(0), then α∗β is the product of two paths defined by
α∗β(s)={α(2s),β(2s−1),0≤s≤2121≤s≤1
Let α:I→X be a path from x0 to x1. The inverse α−1 is defined by
α−1(s)≡α(1−s),s∈I
Let α,β:I→X be loops at x0. They are homotopic, written as α∼β, if there exists a continuous map F:I×I→X such that
F(s,0)=α(s),F(s,1)=β(s),F(0,t)=F(1,t)=x0
The map F is called a homotopy between α,β
In other words, if two paths can continuously deformed to each other, they are homotopic.
One can prove that homotopy is an equivalence relation; in other words, it satisfies the following three properties:
α∼α
α∼β⟹β∼α
α∼β,β∼γ⟹α∼γ
Let X be a topological space. The set of homotopy classes of loops at x0∈X is denoted by π1(X,x0), and is called the fundamental group (or 1st homotopy group) of X at x0. The product of homotopy classes [α],[β] is defined by
[α]∗[β]=[α∗β]
2.General properties of fundamental groups
Arcwise connected: there exists a path from any point to any point Simply connected: any loop in X can be continuously shrunk to a point
2.1. Arcwise connectedness
Let X be an arcwise connected topological space, x0,x1∈X. Then π1(X,x0)≅π1(X,x1) are isomorphic.
Consider η a path from x0 to x1. For [α]∈π1(X,x0), consider η−1∗α∗η.
According to the theorem, for arcwise connected X, we do not need t o specify the basepoint, and simply rewrite as π1(X).
2.2. Homotopic invariance of fundamental groups
The homotopic equivalence of paths and loops can be generalized to arbitary maps. If f,g:X→Y are continuous maps, if there exists continuous map F:X×I→Y such that F(x,0)=f(x),F(x,1)=g(x), then f is said to be homotopic tog, denoted f∼g. The map F is called a homotopy between f and g.
X,Y are topological spaces. They are of the same homotopy type, denoted as X≃Y, iff there exists f:X→Y,g:Y→X such that f∘g∼idY and g∘f∼idX. The map f is called homotopy equivalence and g its homotopy inverse.
"of the same homotopy type" is an equivalence relation in the set of topological spaces
X≃X, where idX is a homotopy equivalence
If X≃Y with f,g, then Y≃X with function g,f
X≃Y,Y≃Z then X≃Z: if X≃Y with function f:X→Y,f′:Y→X, Y≃Z with g:Y→Z,g′:Z→Y, thenX≃Z with functionf′∘g′ and g∘f:
If X,Y have the same homotopy type, f:X→Y is a homotopy equivalence, then π1(X,x0)≅π1(Y,f(x0))
A fundamental group is invariant under homeomorphisms and hence is a topological invariant.
Fundamental groups are a weak classification of topological spaces compared with homeomorphisms. If X and Y have different fundamental groups, they are not homeomorphic.
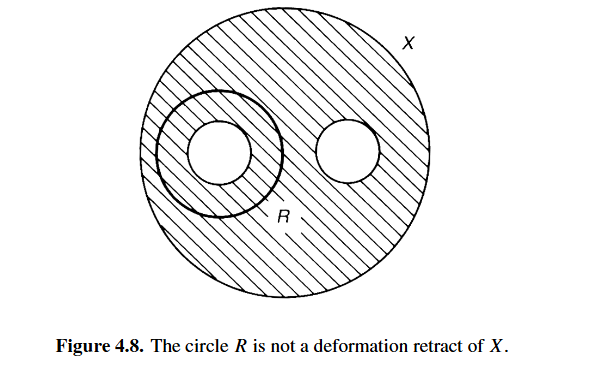
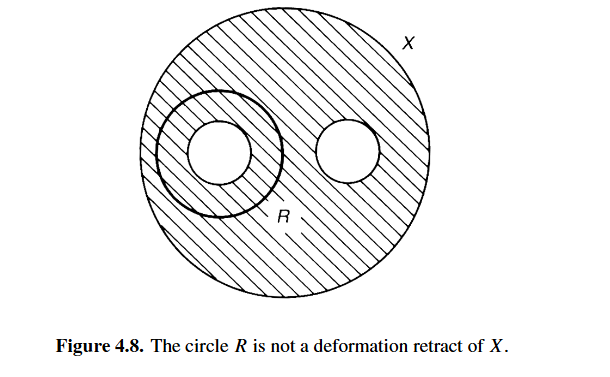
Let R be a subspace of X. If ∃ continuous map f:X→R, f∣R=idR, then R is called a retract of X and f a retraction.
Let R a subspace of X. If ∃ continuous H:X×I→X, such that
H(x,0)=x,H(x,1)∈R,∀x∈XH(x,t)=x,∀x∈R,t∈I
The spaceR is a deformation retract of X. H is a homotopy between idx and a retraction f:X→R.
R is a retract but not deformation retract of X, since the hole in X is an obstruction to continuous deformation of idx to retraction.
Let X={eiθ,0≤θ<2π}, Y={reiθ,0≤θ<2π,21≤r≤32} Define f:X→Y,f(eiθ)=eiθ, g:Y→X,g(reiθ)=eiθ. Observe that f∘g∼idY and g∘f=idX
If a point a∈X is a deformation retract of X, X is contractible
Rn is contractible to the origin: H:Rn×I→Rn by H(x,t)=tx.
D2={(x,y)∣x2+y2≤1}. Show that S1 is a deformation retract of D2−{0}
H:(D2−{0})×I→S1:(r,θ;t)→(r′=t+(1−t)r,θ′=θ)
Sn is a deformation retract of Dn+1−{0}.
A fundamental group of a contractible space X is trivial, π1(X,x0)≅{e}.
π1(S1)≅Z
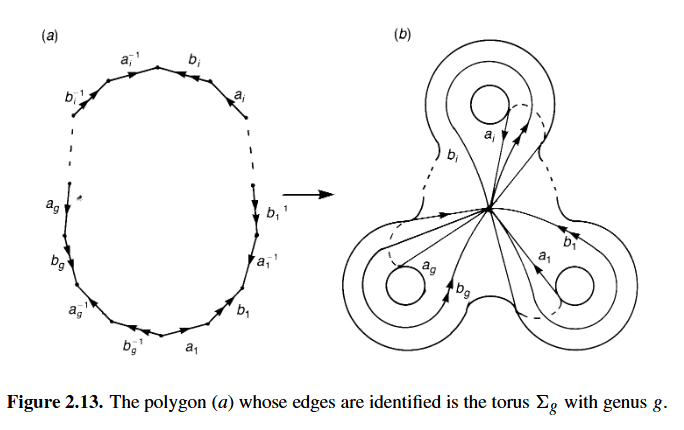
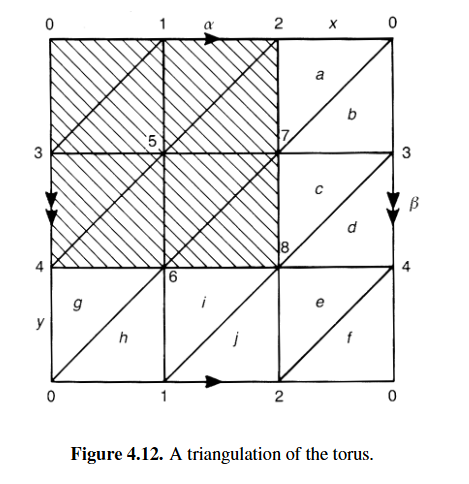
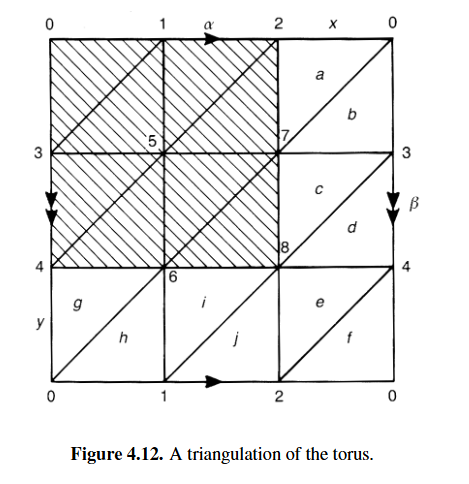
3 Fundamental group of torus
Let X,Y be arcwise connected topological spaces. then
π1(X×Y,(x0,y0))≅π1(X,x0)⊕π1(Y,y0)
T2=S1×S1, so π1(T2)≅Z⊕Z X=S1×R, since π1(R)={e}, so π1(X)≅Z
4. Fundamental groups of polyhedra
Free groups: a subset of a group G is a free set of generators if any g∈G, g=e can be uniquely written as g=x1i1…xnin, n finite and ik∈Z. Adjacent x is not equal and x0 term should be dropped. If so G is called free group. Given a set of generators X, we can construct a free group.The set of all reduced words form a well-defined free group denoted as F[X]. For example, F[{a}]=Z. For a group G generated by X, any element g∈G can be written as g=x1i1…xnin. G is not necessarily free. Let F[X] be the free group generated by X, define a natural homomorphism φ:F[X]→G,
x1i1…xnin→x1i1…xnin∈G
LHS is not unique. so F[X]/kerφ≅G.
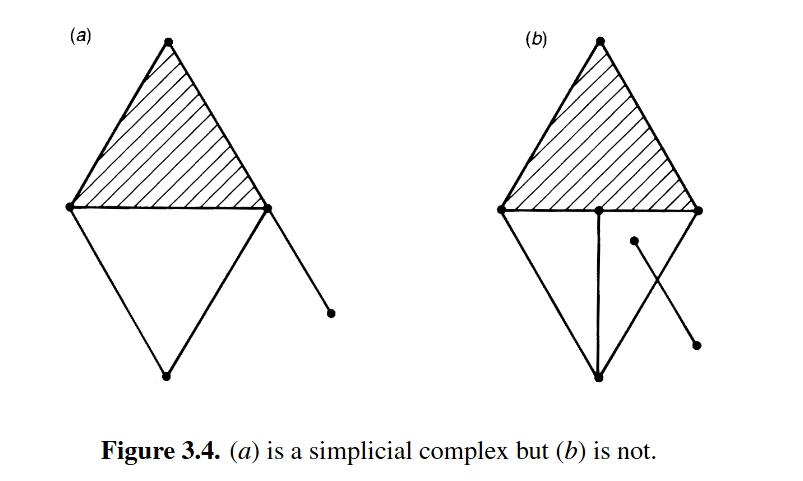
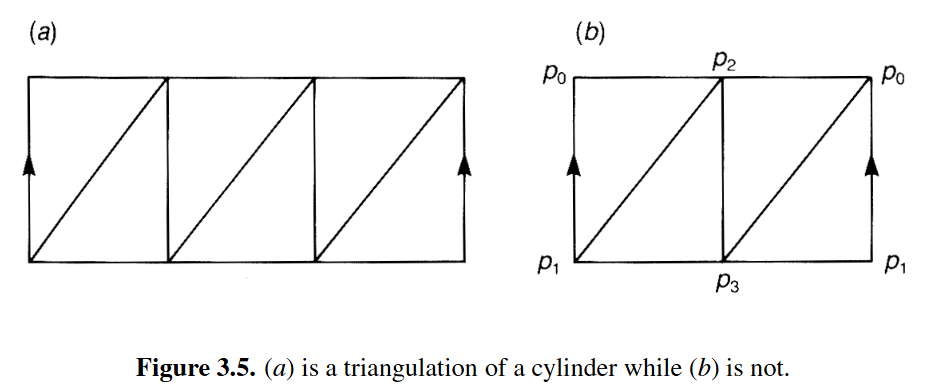
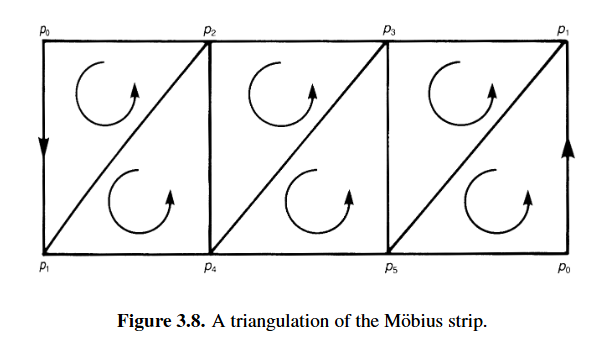
As noted earliear, the polyhedron ∣K∣ is a nice approximation of a given topological space X within a homeomorphism. Since fundamental groups are topological invariants, π1(X)=π1(∣K∣). We assume that X is arcwise connected space, drop base point. The problem becomes calculation of π1(∣K∣).
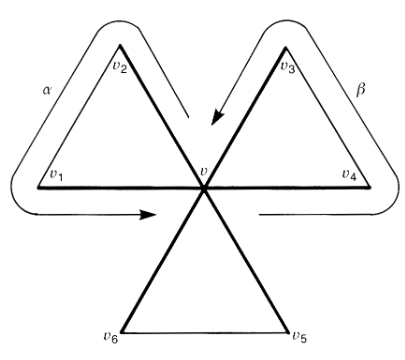
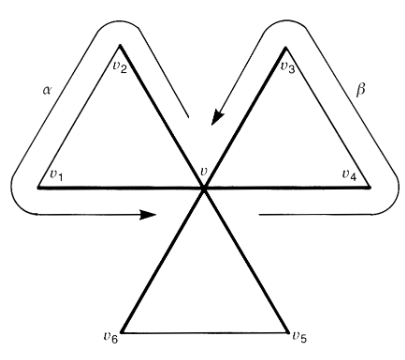
Define the edge path in simplicial complex K as a sequence of vertices v0…vivi+1…vk of ∣K∣. Each adjacent point pairs are a 1-simplex. We allow that vi=vi+1, in this case vivi is a 0-simplex. If v0=vk=v, then the path is a loop.
We classify loops into equivalence classes according to some equivalence relation.
Two edge loops α,β are equivalent iff one is obtained from the other by finite number of times of the following operations:
If u,v,w span 2-simplex in K, edge path uvw may be replaced to uw, and vice versa.
If u=w, the uvw corresponds to traversing along uv first then go backwords. The uvu can be replaced to u.
The group is claled edge group of K at v, denoted as E(K;v).
E(K;v) is isomorphic to π1(∣K∣;v)
Given an arcwise-connected simplicial complex K, there always exists subcomplex L satisying:
L contains all vertices in K;
The polyhedron ∣L∣ is arcwise connected and simply connected. A 1d simplicial complex that is arcwise connected and simply connected is called a tree, A tree TM is a maximal tree of K if it is not a proper subset of other trees. \fcolorbox{pink}{}{Lemma 4.3} A maximal tree contains all vertices of K and satisfies the two conditions above. \fcolorbox{pink}{}{End Lemma} Suppose we obtained the subcomplex L. Since ∣L∣ is simply connected, edge loops in ∣L∣ do not contribute to E(K;v). We can ignore the simplexes in L in our calculation. Let v0=v,v1,…,vn be vertices of K. Assign an object gij for each ordered pair of vertices vi,vj if ⟨vivj⟩ is a 1-simplex of K. Let G(K;L) be a group generated by all gij.
Assign gij=1 if ⟨vivj⟩∈L
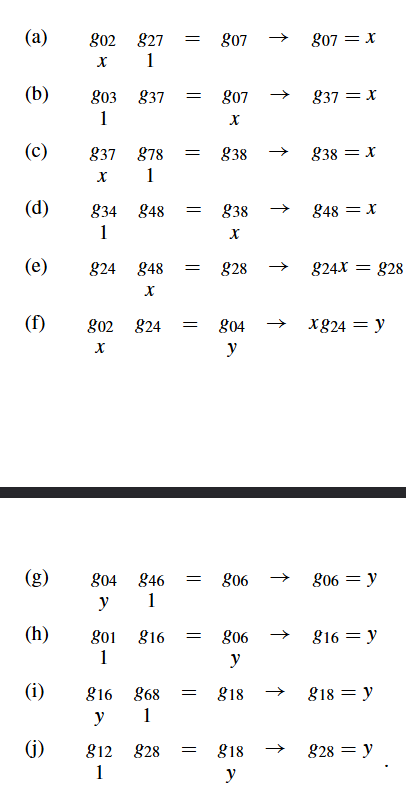
If ⟨vivjvk⟩ is a 2-simplex in K, there are no non-trivial loops around vivjvk, so we have gijgjkgki=1. The generators {gij} and the relations determined group G(K;L).
Some more specific relations:
gijgji=gii=1, so gji=gij−1, we only assign gij to vi,vj such that ⟨vi,vj⟩∈K−L, i<j
例如,∣K∣是三维球D3的多面体,其边界∣L∣是S2的多面体。由于D3可收缩(contractible),π1(∣K∣)≅{e}. 因此π1(S2)≅π1(K(2))≅π1(∣K∣)≅{e}. In general, n≥2, (n+1)-simplex σn+1 and ∂σn+1 has the same 2-skeleton. If we find that σn+1 is contractible, and ∂σn+1 is a polyhedron of Sn, we have π1(Sn)≅{e},n≥2
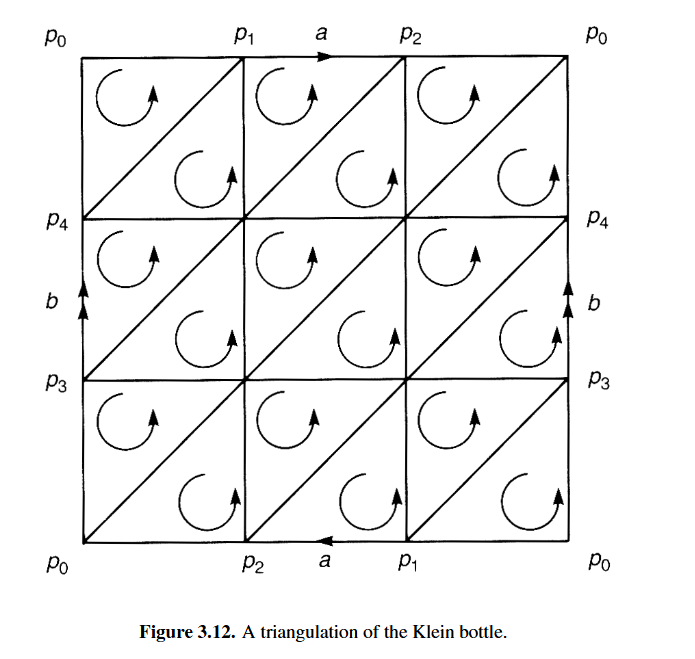
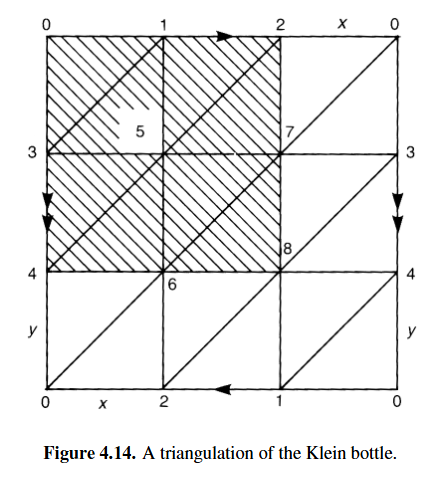
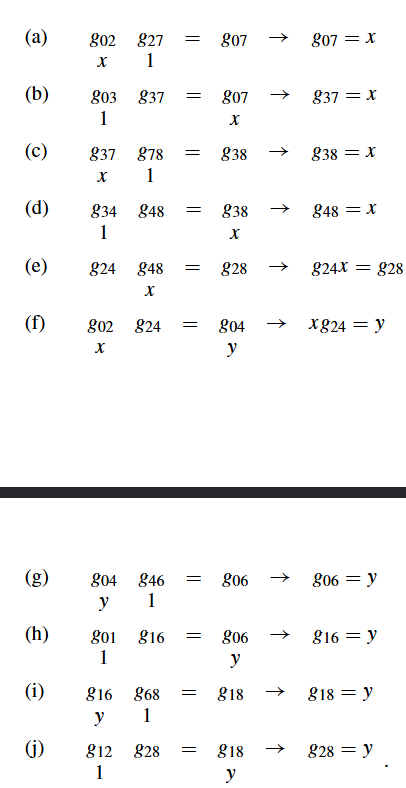
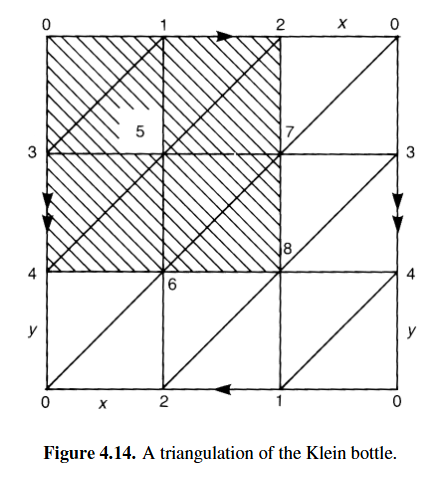
triangulation of Klein bottle. 同样有11个生成元和10组关系。令x=g02,y=g04,可以证明xyxy−1=e,则
π1(Klein Bottle)≅(x,y;xyxy−1)
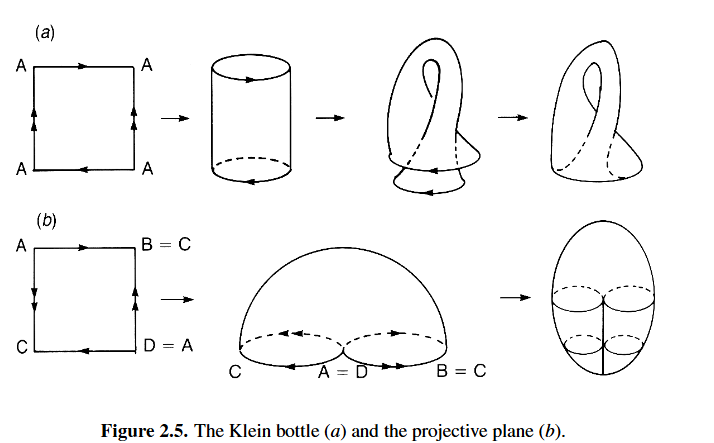
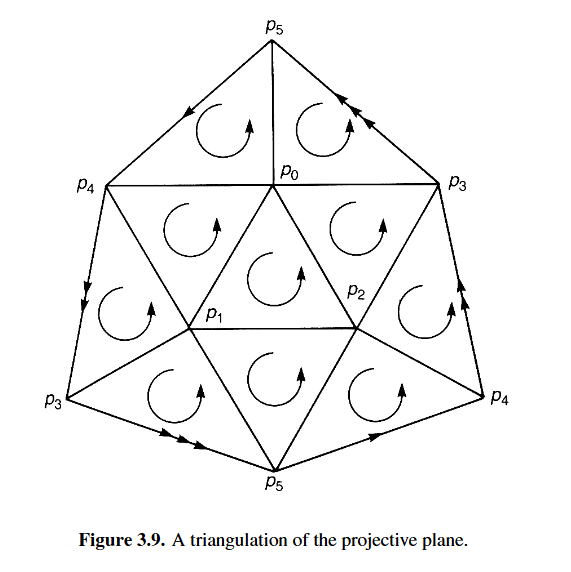
: π1(RP2)≅(x;x2)≅Z2
Relation between H1(K) and π1(∣K∣)
Let K be a connected simplicial complex, then H1(K)≅π1(∣K∣)/F, where F is the commutator subgroup of π1(∣K∣).
Let G=(xi;rm), then the commutator subgroup is a gr pgenerated by elements of the form xixjxi−1xj−1. Thus, G/F is the group generated by {xi} with relation {rm}∪{xixjxi−1xj−1}.
For example, if π1(2-bouquet)=(x,y;∅), then H1(K)≅π1(2-bouquet)/F≅(x,y;xyx−1y−1)=Z⊕Z
The fundamental group classifies the homotopy classes of loops in a topological space X. We can also classify homotopy classes of the spheres in X or homotopy classes of the tori in X. It turns out that the homotopy classes of Sn(n≥2) form a group similar to the fundamental group.
Let In/∂In be the cube In whose boundary ∂In is shrunk to a point, we have In/∂In≅Sn, the continuous maps α:In→X is called n-loop at x0 if ∂In is mapped to x0.
Let X be a topological space, and α,β:In→X be n-loops at x0∈X. The map α is homotopic to β, denoted as α∼β, if ∃F:In×I→X which is continuous and satisfies
F(s1,…,sn,0)F(s1,…,sn,1)F(s1,…,sn,t)=α(s1,…,sn)=β(s1,…,sn)=x0 for (s1,…,sn)∈∂In,t∈I
F is called a homotopy between α,β
Next we define group operations. α∗β is defined by
We have α−1∗α∼cx0, where cx0 is a constant n-loop, cx0(s1,…,sn)=x0.
The nth homotopy group at x0, denoted πn(x,x0), is the set of homotopy classes of n-loops (n≥1) at x0∈X.
Let us consider π0(X,x0). In this case I0={0} and ∂I0=∅, Let α,β:{0}→X be such that α(0)=x,β(0)=y. We define α∼β if there exists continuous map F:{0}×I→X such that F(0,0)=x,F(0,1)=y. This shows that α∼β iff x,y are connected by a curve in X. This equivalence relation is independe-nt of x0 and denotes the number of arcwise connected components of X.
6. General properties of higher homotopy groups
Abelian: α∗β∼β∗α, or [α]∗[β]=[β]∗[α]
If a topological space X is arcwise connected, πn(X,x0)≅πn(X,x1) for any x0,x1∈X
If f:X→Y is a homotopy equivalence, then πn(X,x0)≅πn(Y,f(x0)). If X is contractible, then πn(X,x0)={e},n>1.
Let X,Y be arcwise connected topological spaces, then πn(X×Y)≅πn(X)⊕πn(Y)
Let X,Y be arcwise connected topological spaces, thenπn(X×Y)≅πn(X)⊕πn(Y)
R is a universal covering space of S1. Since S1 si identified with U(1), R is a universal covering group of U(1) if R is regarded as an additive group. The map p:R→U(1) may be p:x→ei2πx, p is surjective and if U={e2πix∣x∈(x0−0.1,x0+0.1)}, then
p−1(U)=n∈Z⋃(x0−0.1+n,x0+0.1+n)
which is a disjoint union of open sets of R. p is also a homomorphism w.r.t. (R,+) and (S1,⋅). So (R,p) is the universal covering group of S1.
If (X~,p) is the universal covering space of a connected topological space X, and x0∈X,p(x~0)=x0, then induced homomorphism
p∗:πn(X~,x~0)→πn(X,x0)
is an isomorphism for n≥2. Note: when n=1, π1(R)={e},π1(S1)=Z
The real projective space RPn is obtained from Sn by identifying (x,−x). So it is easy to see Sn is a covering space of RPn for n≥2. Since π1(Sn)={e}, n≥2, we have
πn(RPm)≅πn(Sm)
Note that RP3 is identified with SO(3). SO(3) can be seen as a disc D3 of radius π whose antipodal points on S2 identified. We may also express RP3 as nothern hemisphere D3 of S3, whose antipodal points on the boundary S2 are identified.
S3 is identified with SU(2) too: express g∈SU(2) as
g=(ab−bˉaˉ)
and ∣a∣2+∣b∣2=1. Rewrite a=u+iv,b=x+iy, this becomes S3: u2+v2+x2+y2=1
We find that
πn(Sn,x0)≅Z,n≥1
If α maps Sn to a point, [α] is the unit element. If α maps In/∂In and Sn in the same sense of orientation, then [α] is 1∈Z. Consider n=2, I2/∂I2≅S2, use (θ,ϕ) to represent points on them. α:(θ,ϕ)→(θ′,ϕ′). If α(θ)=θ′,α(ϕ)=ϕ′, the point sweeps S2 once, [α]=1∈Z. If α(θ,ϕ)=(θ,2ϕ), the point sweeps S2 twice while (θ,ϕ) scans I2 once. [α]=2∈Z. So α(θ,ϕ)=(θ,kϕ) gives [α]=k∈Z.
Since Sn is universally covering space of RPn, πn(RPn)≅πn(Sn)≅Z,n≥2
Since Spin(4)=SU(2)×SU(2) universally covers SO(4), πn(SO(4))=πn(SU(2))⊕πn(SU(2)),n≥2
Let H be a Hamiltonian describing a condensed matter system. Assume H is invariant under a certain symmetry operation. The ground state need not preserve the symmetry of H. If so the system undergoes spontaneous symmetry breakdown. Consider heisenberg hamiltonian
H=−J(i,j)∑Si⋅Sj+h⋅i∑Si
which describes N ferromagnetic Heisenberg spins {Si}, where (i,j) sums over nearest neighbours, h is the external magnetic field. The free energy F is defined by exp(−βF)=Z, and average magnetization (β?)
m=N1i∑⟨Si⟩=Nβ1∂h∂F
Consider h→0 limit. Although H is invariant under SO(3) rotations for all Si in this limit, under large β limit, the system does not observe SO(3) symmetry. It is called spontaneous magnetization. The maximum temperature such that m=0 is called critical temperature. m is the order parameter describing the phase transition between ordered state (m=0) and disordered state (m=0).
For small T, minimizing F means minimizing ⟨H⟩, the spins tend to be in the same direction
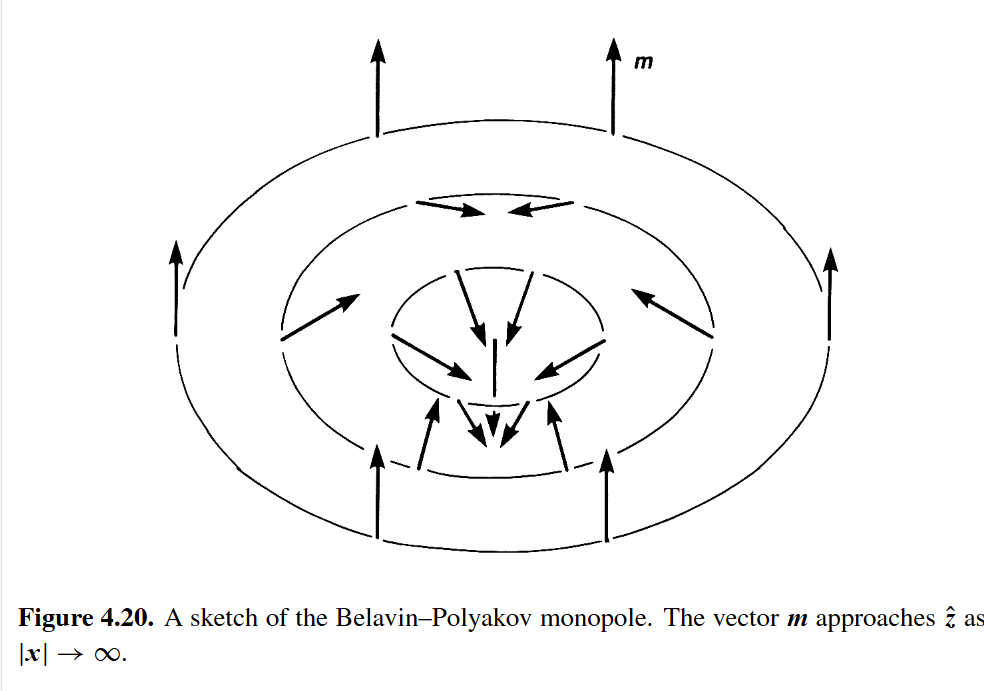
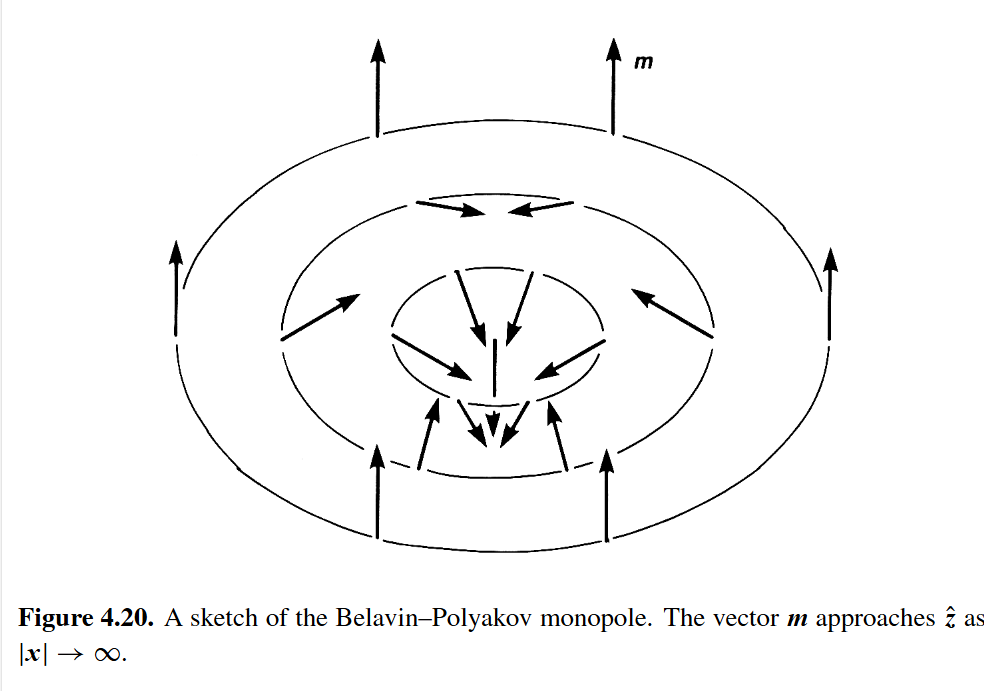
For large T, minimizing F means maximizing S, the spin tend to be disordered. Consider the direction of m. In ground state, m is expected to be independent of position x at ground state. Use (θ,ϕ) to describe direction of m. In excited states the function m(x) depends on x and cannot be obtained by small perturbations from ground state. For 2d, the Heisenberg ferromagnet may admit an excitation called Belavin-Polyakov monopole. The m approaches constant vector so the energy does not diverge. This configuration cannot be deformed to uniform one with m far from origin kept fixed. These excitations are called topological excitations. The m(x) defines map S2→S2 and are classified by π2(S2)=Z.
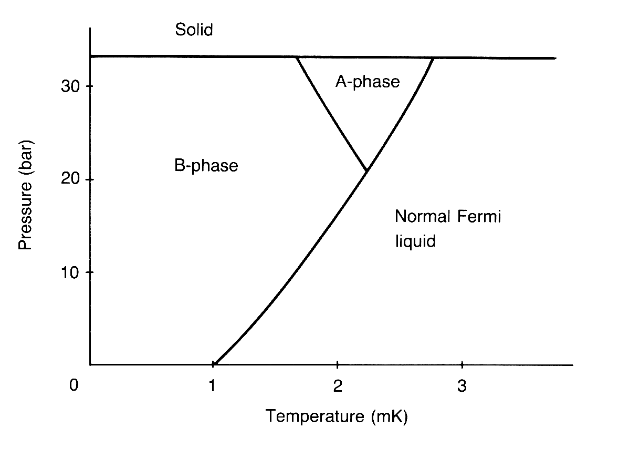
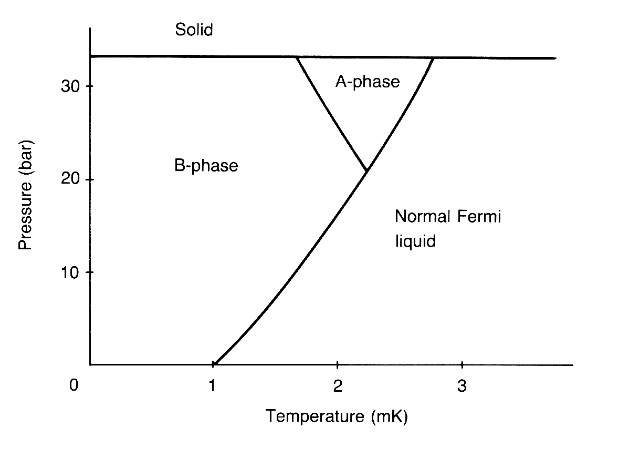
10 Textures in Superfluid He3-A
From NMR and other observations, the superfluid is in the spin-triplet, p-wave state. Instead of field operators Ψαβ(x)=Δμ(x)i(σμ⋅σ2)αβ
The most general form of triplet superfluid order parameter is
⟨cα,kcβ,−k⟩∝μ=1∑3(iσ2σμ)αβdμ(k)
where α,β are spin indices. The Cooper pair forms in the p-wave state, so dμ(k)∝Y1m∼ki,
dμ(k)=i=1∑3Δ0Aμiki
The A-phase order parameter takes the form Aμi=dμ(Δ1+iΔ2)i, d is a unit vector along which the spin projection of Cooper pair vanishes. (Δ1,Δ2) is a pair of orthonormal unit vectors. d takes value from S2. Let l≡Δ1×Δ2, the (Δ1,Δ2,l) forms an orthonormal frame at each point of medium. Since any orthonormal frame is obtained from fixed frame by a rotation, the order parameter of He-3A is S2×SO(3). The vector l is the axis of angular momentum of Cooper pair.
Neglect variation of d^ for simplicity (in fact, d^ is locked along l^ due to dipole force). The order parameter assumes the form Ai=Δ0(Δ^1+Δ^2)i, where Δ^1,Δ^2,l^≡Δ^1×Δ^2 forms an orthonormal frame at each point of the medium. Take a standard frame e1,e2,e3, the frame is obtained by applying g∈SO(3) to (e1,e2,e3). So (Δ^1(x),Δ^2(x),l^(x)) defines a map ψ:X→SO(3), called texture of superfluid He-3. The relevant homotopy groups for classifying defects are πn(SO(3)).
Brouwer fixed-point theorem: prove that there are no smooth function f:D2→D2 such that f has no fixed points, namely f(p)=p for any p∈D2.
Let S1=∂D2 be its boundary. Suppose there exists such f, consider a semi-line startng at p through f(p) and it intersects S1 at point q (this is well defined since f(p)=p). Define f~:D2→S1 by f~(p)=q. f~ is also smooth. However, π1(S1)=Z and π1(D2)={0}, such smooth f~ does not exist and hence, f must have fixed points.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave a Comment